
参考教材《Physics from symmetry》-Jakob Schwichtenberg 说是群论,其实是李群啦。 群是什么?大致可以理解为集合+一种运算。比如说所有转动操作构成的集合,加上运算符 除此之外,对群还有一些数学要求:
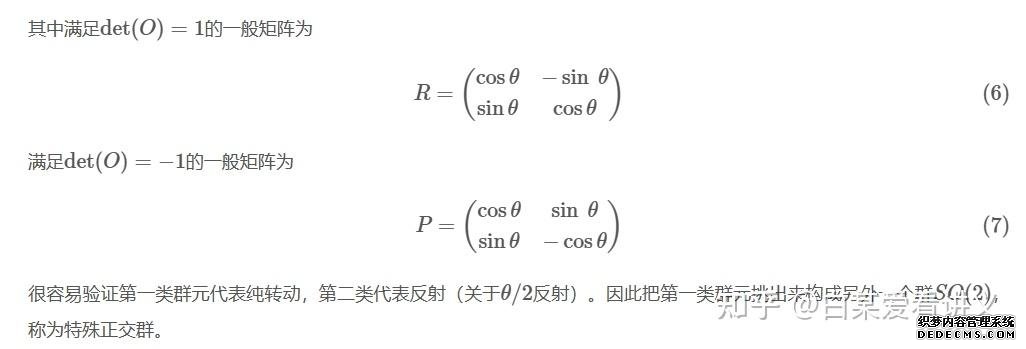
上面是对群论的一些简单介绍,下面举一些具体的例子 先研究二维空间中的转动。 转动的定义中包含有“矢量模长不变”,但显然不只有这个要求,因为起码反射也符合这个要求,因此如果只有“模长不变”的要求的话,那么转动和反射便没有区别。但我们可以先找到所有满足“模长不变”的操作,再从中挑出我们心仪的转动操作。 根据上述定义自然有(选取矩阵表示)
知乎中的align环境如何显示在中间呢? 显然满足“模长不变”的操作的矩阵也满足正交矩阵的定义: 很容易可以证明,以矩阵乘法作为群乘法是封闭的,逆元恒元结合律自然有矩阵运算保证。因此所有2x2的正交矩阵构成二维实空间的正交群
 同样在复数域中我们很容易可以得到,模长不变的操作满足
对于复数而言,由于欧拉公式
如此,复数域上的两个基底都被实矩阵表示了,这样复空间中的转动便可以写为
嗯,我们发现复数域中的幺正群 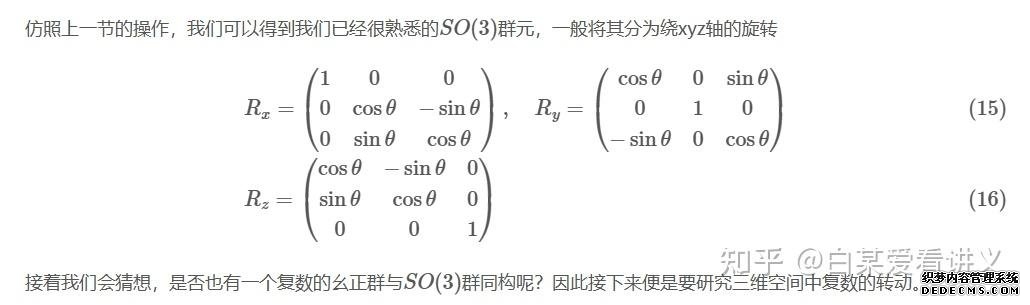 四元数Quaternions的转动 前面二维空间时,我们选取了两个实自由度的复数域,因此我们或许会猜想这时要选取三个实自由度的复数域,但在数学上,这样的数域定义似乎不是很良好(具体可以查一下三元数),而四元数在抛弃乘法交换律的前提下,性质非常符合我们的要求,因此我们使用四元数来描述三维转动。(很快你会发现,这个四元数跟我们熟悉的泡利矩阵基本算同一个东西) 四元数的构建需要引入另外两个单位复数满足
注意我们新引入的复数是不满足乘法交换律的,第三行可以从第二行推出来。 将四元数记作
四元数在四元数乘法作为群乘法时构成一个群。我们先证明四元数可以对矢量进行转动操作,为此我们要研究四元数的结构。 四元数中三个复数基底之间是不满足交换律的,但他们分别与单位1的乘积是满足交换律的,因此很自然的,三个复数基底自己可以张成一个与单位1没啥关系的向量空间,而且明显是三维的。将这个矢量空间记作W,W空间中的矢量乘积已经被基矢之间的乘积定义了,因此我们可以得到矢量中任意两个矢量 “内积”是一种映射:
现在在这个矢量空间W中定义一个内积括号
好吧,现在矢量空间W中的矢量乘法是不封闭的,听起来不太妙,但是没关系,我们用于转动的是四元数q,而不是这三个虚数,把实维度补充到上面的矢量空间后
原谅我在这之前还没有在四元数的空间中定义内积括号[2],现在我们发现四元数的厄米乘上自身得到的便是该四元数的内积,这与
你说:"我们已经用四元数把矢量 当然,如果你喜欢,也可以定义 太好了,我们终于得到了四元数表示的转动,很容易验证 真是辛苦自己了(阿妮亚如是说) 证明了四元数本身可以表示转动后,紧接着便要研究四元数的转动群与 双覆盖(Double cover) 仿照二维的思路,先为四元数的基矢找到合适的矩阵表示,合适的矩阵表示有很多种,但这里选择2x2矩阵来表示(为了和泡利矩阵对应,这里的矩阵和书上的不太一样)
我们现在得到了四元数的矩阵表示,而且行列式为+1,上面的四元数构成特殊酉群$SU(2)$。 任意转动
取矢量
太讨厌知乎敲矩阵了,为什么没有physics宏包的命令 其转动的角度为 下集请戳: 白某爱看讲义:群论学习笔记(part2) (责任编辑:admin) |
 构成转动群。比如说群元素
构成转动群。比如说群元素  与
与  是多少,由运算符的规定给出
是多少,由运算符的规定给出 [1]
[1]






 ,复数天生就很容易可以表示转动,因此我们很容易取到
,复数天生就很容易可以表示转动,因此我们很容易取到  ,满足上述要求,以复数乘法为群乘法,构成幺正群
,满足上述要求,以复数乘法为群乘法,构成幺正群  。为了与实数域的转动群对比,我们也为其选取矩阵表示(用2x2的实矩阵来表示复数)
。为了与实数域的转动群对比,我们也为其选取矩阵表示(用2x2的实矩阵来表示复数)

 的矩阵表示一模一样,很显然两个群之间的映射
的矩阵表示一模一样,很显然两个群之间的映射  是双射,而且满足
是双射,而且满足  ,所以
,所以 
 ,与二维的情况相同,我们要求四元数满足
,与二维的情况相同,我们要求四元数满足
 之间的乘积为(我们把矢量乘积的符号用
之间的乘积为(我们把矢量乘积的符号用  来表示,但注意这并不是内积)
来表示,但注意这并不是内积) 的映射,属于张量,我们在这个矢量空间中还没下这个定义
的映射,属于张量,我们在这个矢量空间中还没下这个定义
 ,其运算规则与高中普通矢量的内积规则相同;同时观察上式的乘积结果,其结果并不能被矢量空间W中的基底线性表示,也就是说这个乘法运算并不是封闭的,根据内积括号与我们曾经学过的叉乘,我们可以将上面的结果写为
,其运算规则与高中普通矢量的内积规则相同;同时观察上式的乘积结果,其结果并不能被矢量空间W中的基底线性表示,也就是说这个乘法运算并不是封闭的,根据内积括号与我们曾经学过的叉乘,我们可以将上面的结果写为
 的空间是四元数的空间,它的乘法是封闭的,设四元数
的空间是四元数的空间,它的乘法是封闭的,设四元数  ,把每个四元数都写成实数与三维矢量的叠加(聪明的你肯定知道我哪个字母指代的是实数,哪个是虚数矢量),我们再来看看四元数的乘法:
,把每个四元数都写成实数与三维矢量的叠加(聪明的你肯定知道我哪个字母指代的是实数,哪个是虚数矢量),我们再来看看四元数的乘法:
 是一样的,因此我们可以很安心地取一个模长为1的四元数q,然后我们声称他可以转动一个三维矢量,你兴冲冲地取来一个矢量
是一样的,因此我们可以很安心地取一个模长为1的四元数q,然后我们声称他可以转动一个三维矢量,你兴冲冲地取来一个矢量  ,然后把归一化的四元数丢上去
,然后把归一化的四元数丢上去  ,嗯,左边是一个矢量,右边的实数部分可以直接乘上去,但是u也是一个三维矢量,它的基底是
,嗯,左边是一个矢量,右边的实数部分可以直接乘上去,但是u也是一个三维矢量,它的基底是  ,它和
,它和  乘积得到....?等下,这个式子怎么会有六个矢量基底,你发现这不妥,所以这是三维矢量当然不能拿
乘积得到....?等下,这个式子怎么会有六个矢量基底,你发现这不妥,所以这是三维矢量当然不能拿  来表示,四元数自己的运算封闭,你得拿四元数来表示,好在四元数中自带一个三维的矢量空间W,最基本的数乘和矢量加法规则还是满足的,所以我们要用W中的矢量
来表示,四元数自己的运算封闭,你得拿四元数来表示,好在四元数中自带一个三维的矢量空间W,最基本的数乘和矢量加法规则还是满足的,所以我们要用W中的矢量  来表示三维空间中的矢量。好了,这下我们的四元数乘矢量
来表示三维空间中的矢量。好了,这下我们的四元数乘矢量  的表达式中起码不会出现一堆不知道怎么运算的矢量乘积,但是有一个严重的问题,你可能还看不出来,没关系,你按照我们之前的四元数乘法算一下:
的表达式中起码不会出现一堆不知道怎么运算的矢量乘积,但是有一个严重的问题,你可能还看不出来,没关系,你按照我们之前的四元数乘法算一下:
 甚至不在矢量空间W里,这是一个严重的问题。所以这意味着四元数的转动表示肯定不是
甚至不在矢量空间W里,这是一个严重的问题。所以这意味着四元数的转动表示肯定不是  ,我们也不卖关子了,四元数中的转动应当是
,我们也不卖关子了,四元数中的转动应当是 
 ,只不过你定义的转动方向可能和我的不太一样
,只不过你定义的转动方向可能和我的不太一样 群之间的联系
群之间的联系
 ,以绕z轴为例
,以绕z轴为例
 :
:
 ,因此
,因此  群中的参数为
群中的参数为 ![[0,\pi]](/uploads/allimg/251130/1-2511301R23L60.jpg) 或
或 ![[\pi,2\pi]](/uploads/allimg/251130/1-2511301R23KA.jpg) 对应的群元便可以与
对应的群元便可以与  与
与  的关系更适合比喻两个群(或者单层吉士堡也很贴合)。
的关系更适合比喻两个群(或者单层吉士堡也很贴合)。